Whether you are exploring ROBILE’s capabilities, or you’re integrating it into your projects, KELO ROBILE downloads provide everything you need in one place.
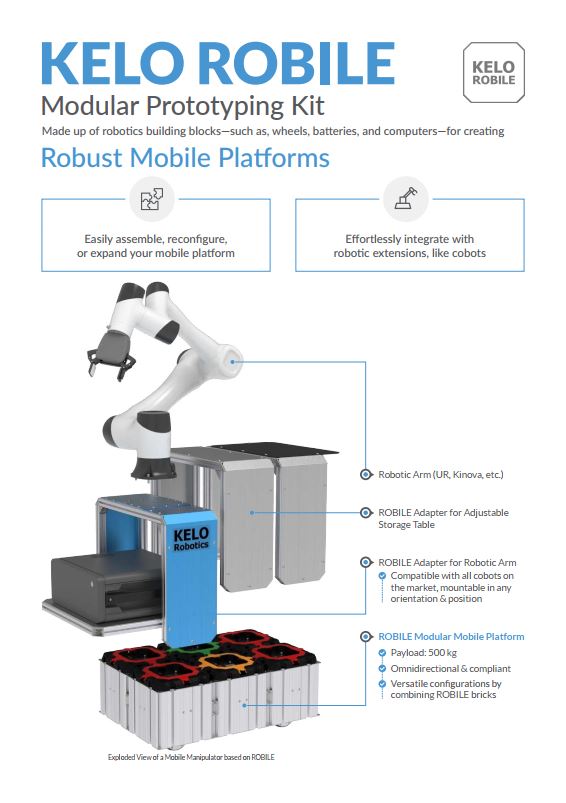
ROBILE Brochure
This brochure provides an overview of:
-
How ROBILE modular autonomous mobile robot can be transformed into a mobile manipulator
-
ROBILE hardware and modules
-
ROBILE software
-
ROBILE in practice: UR cobots integration, UFACTORY dual-arm integration, deployment as a proof of concept in mobile wall systems
Software
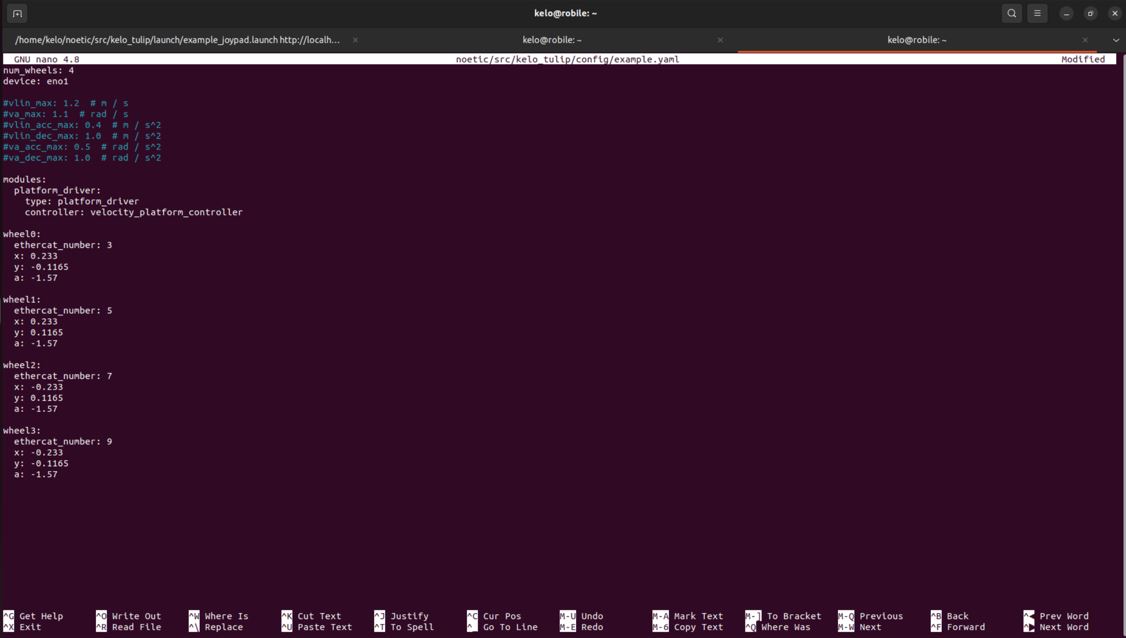
Open Source KELO Tulip
- Platform controller: Enables the user to control the linear and angular velocity of a platform with an arbitrary number (two or more) of drives. The geometry of the drives has to be specified in a configuration file.
Closed source
- Torque-based platform controller: Enables the user to command linear and angular velocity of a platform with an arbitrary number (two or more) of KELO drives. This platform controller converts this to forces/torques, which can be limited and allow a safer operation of the platform around people. The geometry of the drives has to be specified in a configuration file. If interested, please contact info@kelo-robotics.com